The attached file is a cube centered at the origin.
I have imposed an angular velocity of one rotation per second.
Overall computation time is 3 seconds (three revolutions are expected).
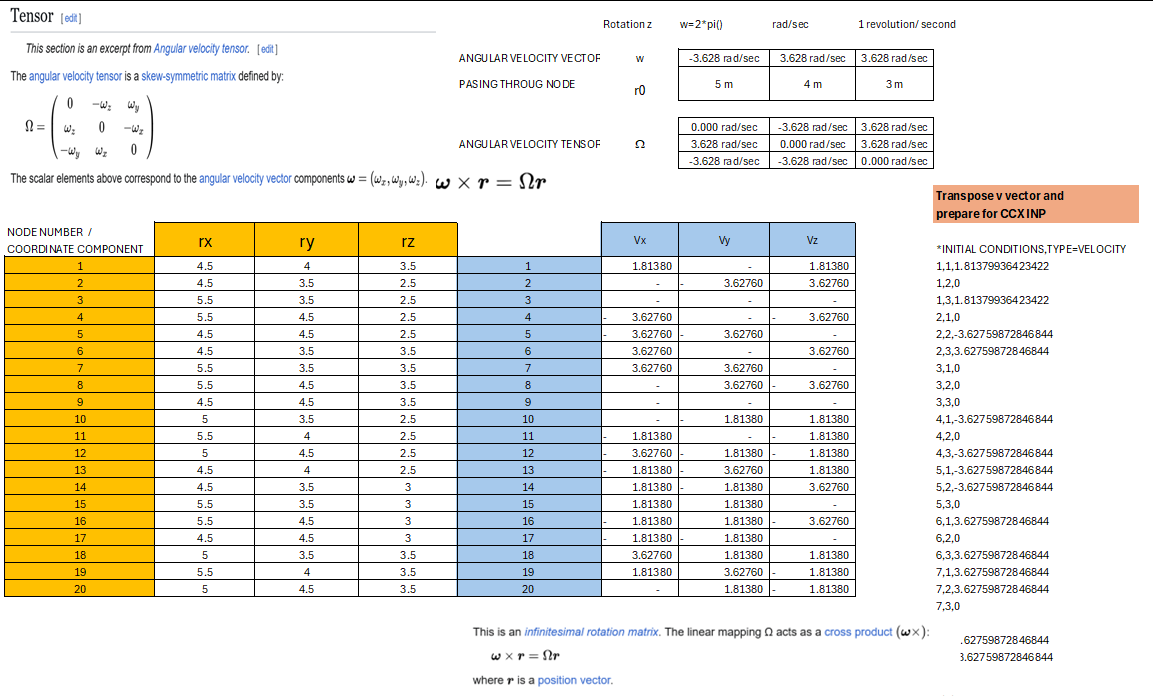
Angular velocity points in direction w=(1,1,1)
Expected results:
-One rotations is completed at the end of each second. (Constant Speed)
-Cube do not offset. (My cross product is working).
-The displacements of the two corner nodes at (0.5, 0.5, 0.5) and (-0.5,- 0.5, -0.5) remain zero as they are aligned with the rotation axis.
-Velocity magnitude field should remain constant.
I also have it for the simplest case where angular velocity is aligned with main axis.
*NODE
1,-0.5,0,0.5
2,-0.5,-0.5,-0.5
3,0.5,-0.5,-0.5
4,0.5,0.5,-0.5
5,-0.5,0.5,-0.5
6,-0.5,-0.5,0.5
7,0.5,-0.5,0.5
8,0.5,0.5,0.5
9,-0.5,0.5,0.5
10,0,-0.5,-0.5
11,0.5,0,-0.5
12,0,0.5,-0.5
13,-0.5,0,-0.5
14,-0.5,-0.5,0
15,0.5,-0.5,0
16,0.5,0.5,0
17,-0.5,0.5,0
18,0,-0.5,0.5
19,0.5,0,0.5
20,0,0.5,0.5
*ELEMENT,TYPE=C3D20
1,2,3,4,5,6,7,8,9,10,11,12,13,18,19,20,
1,14,15,16,17
*ELSET,ELSET=DEFAULT
1
*MATERIAL,NAME=MATERIAL
*ELASTIC,TYPE=ISOTROPIC
100000000000,0.3
*DENSITY
10000
*SOLID SECTION,ELSET=DEFAULT,MATERIAL=MATERIAL
*INITIAL CONDITIONS,TYPE=VELOCITY
1,1,1.81379936423422
1,2,-3.62759872846844
1,3,1.81379936423422
2,1,0
2,2,0
2,3,0
3,1,0
3,2,3.62759872846844
3,3,-3.62759872846844
4,1,-3.62759872846844
4,2,3.62759872846844
4,3,0
5,1,-3.62759872846844
5,2,0
5,3,3.62759872846844
6,1,3.62759872846844
6,2,-3.62759872846844
6,3,0
7,1,3.62759872846844
7,2,0
7,3,-3.62759872846844
8,1,0
8,2,0
8,3,0
9,1,0
9,2,-3.62759872846844
9,3,3.62759872846844
10,1,0
10,2,1.81379936423422
10,3,-1.81379936423422
11,1,-1.81379936423422
11,2,3.62759872846844
11,3,-1.81379936423422
12,1,-3.62759872846844
12,2,1.81379936423422
12,3,1.81379936423422
13,1,-1.81379936423422
13,2,0
13,3,1.81379936423422
14,1,1.81379936423422
14,2,-1.81379936423422
14,3,0
15,1,1.81379936423422
15,2,1.81379936423422
15,3,-3.62759872846844
16,1,-1.81379936423422
16,2,1.81379936423422
16,3,0
17,1,-1.81379936423422
17,2,-1.81379936423422
17,3,3.62759872846844
18,1,3.62759872846844
18,2,-1.81379936423422
18,3,-1.81379936423422
19,1,1.81379936423422
19,2,0
19,3,-1.81379936423422
20,1,0
20,2,-1.81379936423422
20,3,1.81379936423422
*STEP,NLGEOM=YES,INC=5000,AMPLITUDE=STEP
*DYNAMIC
0.001851852,3,0,0.001851852
*NODE FILE,GLOBAL=YES
U
*EL FILE
S,NOE,E,ENER
*CONTACT FILE
CDIS,CSTR
*END STEP