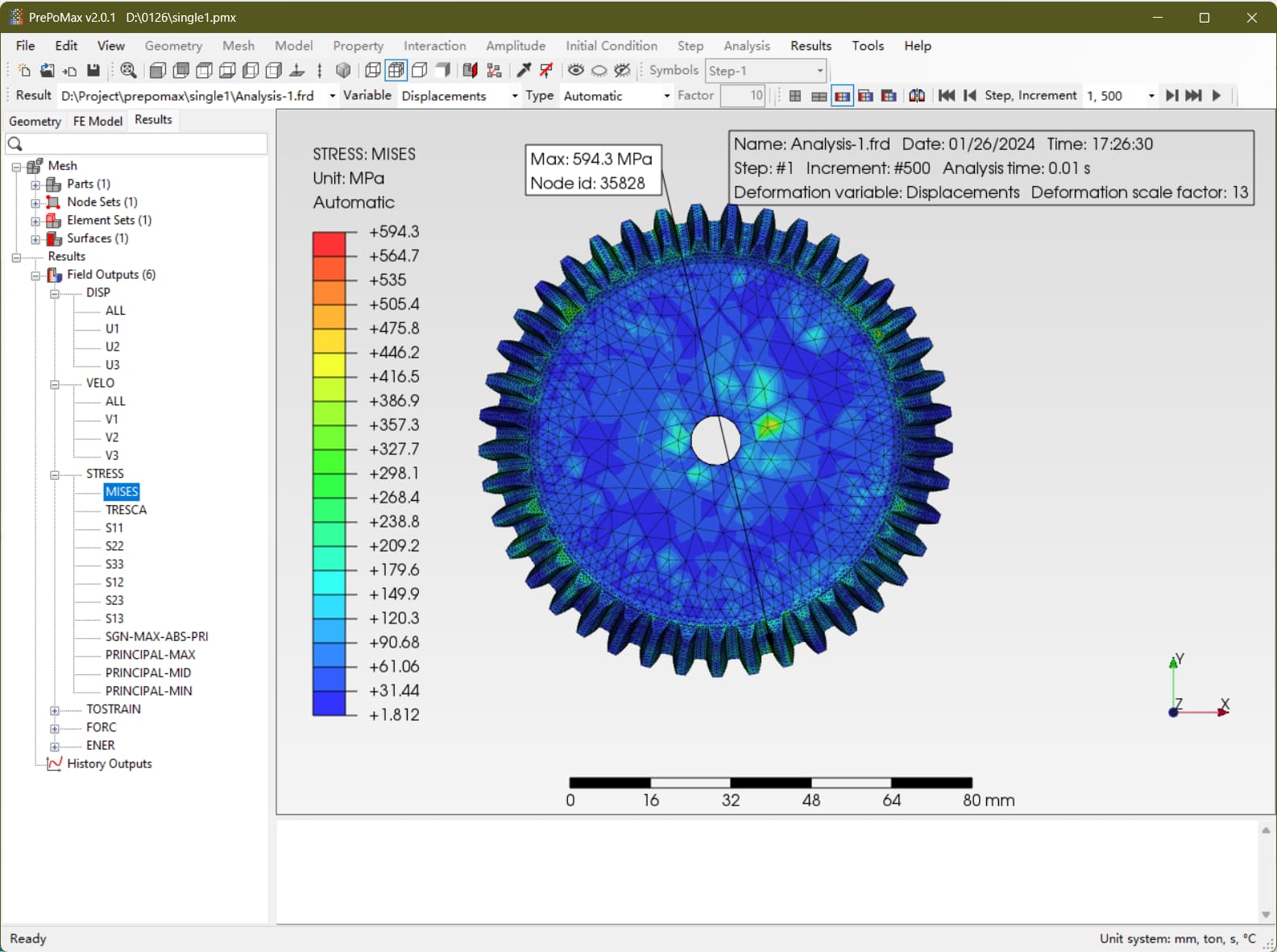
I tried to apply a speed of 10 rad/s to the bevel gear, as shown in the figure. I created a rigid point and connected it to the shaft plane, adding the speed to the rigid point. However, the stress value in the final simulation result was outrageous because the loaded speed was only 10 rad/s. I hope someone can help me check where the settings are problematic. Thank you.
WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
When analyzing a single rotating object (rotor, gear, etc.) it’s best to run a static analysis with centrifugal force load. Example here: https://www.youtube.com/watch?v=fT21I-fV1D0

Thank you for your reply. Actually, what I am doing is a dynamic simulation of a pair of gears, but the results also show this large stress (as shown in the figure, the applied speed here is 1000rad/s). Therefore, I suspect that there is a problem with the speed application method of the gears. I made a single gear to test it.

Can you give me some advice as I need to apply rotational speed instead of centrifugal force for dynamic simulation of a pair of gears?
You are using explicit dynamics step with a specified minimum time increment which means that mass scaling is used. It can be large and cause jumps in kinetic energy, affecting the results.
Your analysis submitted in Abaqus with mass scaling using the same target time increment as your CalculiX simulation (2e-5):

The same analysis but with two orders of magnitude smaller target time increment (and thus much lower mass scaling):

Plots on the right show internal and kinetic energy.
I would recommend lowering the minimum time increment or (even better) switching to dynamic implicit or static analysis and using prescribed rotational displacement instead of initial velocity. If it doesn’t converge, you can go back to explicit but keep in mind that you are applying initial velocity which means that the gear is spinning initially, only to hit the other gear (in your main simulation) and stop rotating eventually. It’s a highly dynamic even, basically impact problem. So you should decide whether you want to simulate something like this or constant rotation during operation of the gear. In the latter case, you will need a boundary, not initial condition and explicit analysis may not be necessary, as explained above.
P.S. I made a tutorial about explicit dynamics in CalculiX as well, covering the importance of the incrementation settings: https://www.youtube.com/watch?v=-X0Shj7UXE0
Thank you, I will try your suggestion. Also, if I decide to simulate constant rotation, how should the boundary be applied.
Use a Displacement/Rotation boundary condition applied to the reference point of rigid body constraint attached to the rotating gear - specify non-zero value in radians as UR3. Of course, you can also assign an amplitude to control this rotation in time.
I think one showld also apply some friction or breack to the driven gear or there would be Rigid body rotation.
That may also happen with Dynamic . The driven gear would bounce oscillating between the two sprockets.
Haven’t seen the animation but I would say that could be actually happening

It was a simulation of a single gear. The noise is due to aliasing.