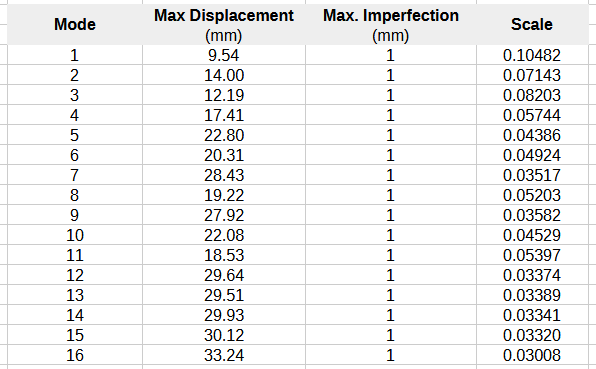
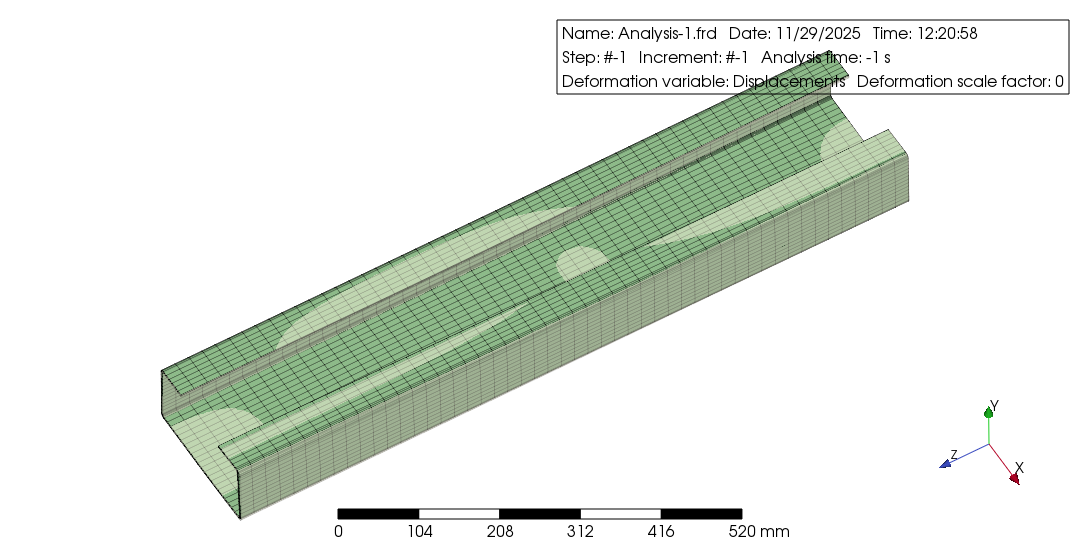
Generates final shape of imperfection is a tedious work and it could be useful when PrePoMax can do automatically. Below an example of imperfection models taken from eigenfrequency analysis, each mode needs to be saved and rerunning for total of sixth teen cases to generate final shape of imperfection. User defined by maximum imperfection (units of length) for each mode is more clearly than scale factors, usually a portion to width or height of sections e.g 1/200. Zero value can be meaning of previous deformed geometry being used to skip without analysis to run.
the caution may apply for Abaqus user only since it used linear superpositions of eigenbuckling modes, my approach proposed are multi steps analysis as example given have large cases saved and rerunning. Zero value also can be used to skip or ignore by user, so the caution is inappropriate or have no sense.
If the procedure you are suggesting does not involve modal superposition as Abaqus or Ansys does, but rather a separate analysis for each seed with multiple steps, I must admit I was not aware of such an approach.
In my view, your post was clearer prior to the latest edition.
Wouldn’t that method be computationally very expensive?
In any case, it would be advisable to caution potential users regardless the method employed to inspect the modes that serve as seeds for generating imperfections, specially when the process is automated.
In the scenario you describe, one could end up doubling the computational effort. Perhaps the STEP should explicitly reference the eigenfrequency from which the imperfections were extracted, in order to avoid such redundancy.
eigenfrequency or eigenbuckling is not computationally expensive in CalculiX i guess, it usually takes second to minutes for single case. Also, user have opportunity to select only desired modes to reducing computational cost.
user can investigate deformed modes firstly before defining maximum imperfection, is that global or local imperfections. So, this approach is not fully automatic without any justification but helping to simplify the task.
running multi steps analysis may read deformed mesh from previous, but needed to validate and the actual shape with imperfection cannot be shown
If I understand properly, you suggest to take each eigenfrequency or eigenbuckling mode shape, build an imperfaction new model from each one (12 new geometries) and run a full GMNIA for each one of them (12 GMNIA analisys each one on a separate Step). Did I understand properly?
no any nonlinear analysis being performed, only eigen analysis and final shape of imperfection from deformed mesh combination in multiple case ran. The task can be explained as below,
Performing eigenfrequency or eigenbuckling analysis
User menus to defining maximum imperfection in length units for each mode
Saved deformed mesh from 1st mode with scale internally
Repeat the same case with updated mesh from previous and so on.
In your 4 point list you only mention modal analysis, which a linear solve, and has no loads, right? You haven’t mentioned buckling or anything like that?
If I understood correctly above, then what is an ‘imperfection’ for you when you only use results from a modal analysis? Furthermore, in linear dynamics you usually only use the superposition method when solving a forced response (freq or time), and that has loads and amplitudes.
What is it in a real life example you are trying to do?
you may refer to modal combination probably, using square root of the sum or complete quadratic commonly in linear respons spectrum analysis i.e seismic loads.
my proposed approach is different things by multiple case to run and updating to generate final shapes. Geometric imperfection is mandatory for nonlinear buckling analysis (large deformation and plasticity), accuracy of member capacity much depends on this user definitions. There are knock down factor for safety and tolerances also, since imperfection is unknow at design phase.
Aah, got cha now. You are talking about NL buckling.
Then I agree, modelling imperfections correctly is the key. Then, it sounds like a coding job, maybe in python driving solver and outputs into new batch runs. Not easy/quick to do, I guess.
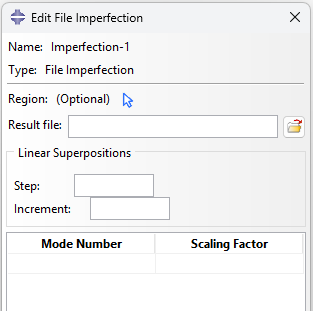
To clarify how it’s done in Abaqus - this solver has the *IMPERFECTION keyword, so it could be a request for CalculiX itself too. With this keyword, you can specify the imperfections in 3 ways:
Based on eigenmodes - superposition of weighted mode shapes, you specify the file containing the results from eigenfrequency extraction or eigenvalue buckling analysis, then enter mode numbers and their corresponding scaling factors in the data lines. Optionally, you can choose the target nset.
Based on a static analysis - you specify the file containing the results from a static analysis and select the increment from which the results are taken. The scaling factor is also provided. Optionally, you can choose the target nset.
Defined directly - you specify the imperfection directly as a table of node numbers and imperfection components in the global or local coordinate system.
i’m not sure if the solver will be implemented this feature in the future, Abaqus approach is unclear and doubting many of users itself, and previous version only support eigenbuckling not eigenfreguiency. Also, the limitation of CalculiX solver has been fulfilled by CGX probably, latest versions seem to have feature of updating current models with deformed shape and scale in active view.
my proposed approach can be clearer since it based on maximum imperfection in length units instead of scale factor as Abaqus does, there are no have problems incidentally discarding by linear superpositions also.